[TOC]
MPU6050介绍
MPU6050简介
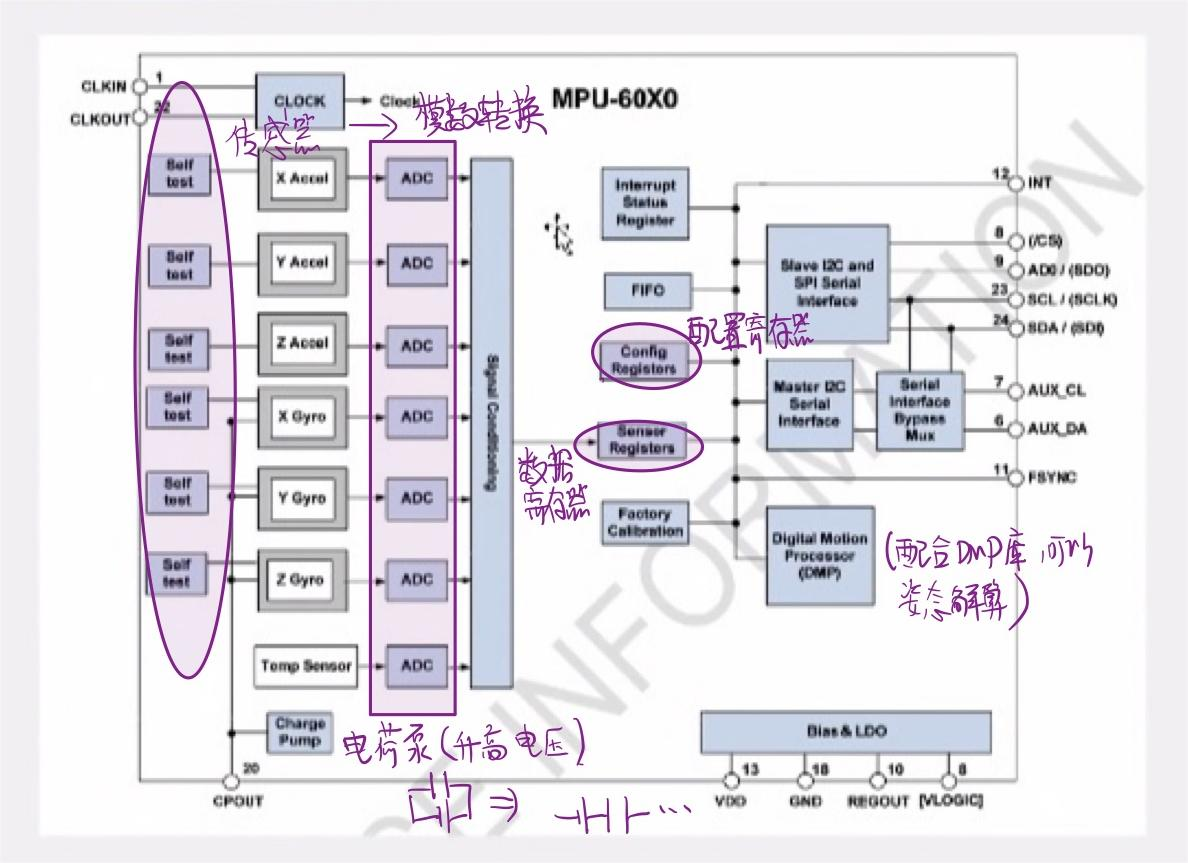
mpu6050是一款多轴传感器融合的运动处理模块,它具有一个嵌入式3轴MEMS陀螺仪,一个3轴MEMS加速度计以及一个DMP硬件加速引擎,通过I2C通信接口,mpu6050模块可将整合的加速度以及角加速度信息发送到终端MCU,供设备使用。这一特性使其广泛运用于手机、平板、游戏控制器、可穿戴式设备等领域。
在江科大提供的模块资料中,我们可以找到product specification和register map手册,但是英文版手册难以阅读,这时可以使用翻译网站DeepL翻译:全世界最准确的翻译进行pdf、word等格式手册的自动翻译,使用效果还是非常不错的。
硬件电路及引脚定义
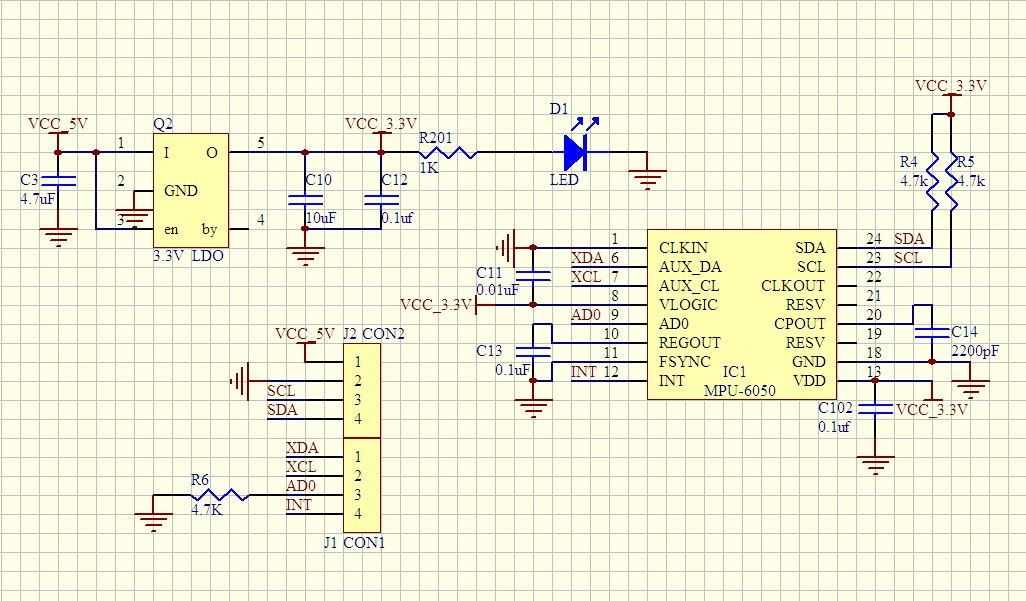
- I2C通信SCL、SDA:引脚23、24,内置了4.7k的两个上拉电阻。
- 电源引脚VDD、GND:引脚13、18。
- 主机I2C引脚XCL、XDA:额外的I2C通信引脚,连接外部磁力传感器,可通过DMP向应用输出完整的9轴融合演算数据。
- 地址AD0引脚:设置通信中的从机地址,若引脚不接(接地状态)则地址为0x68;若接入高电平,则为0x69。
- 中断引脚INT:通过设置相应寄存器,可以实现中断的配置。
数据采集和传输原理
$$
\mid 使能前的值-使能后的值\mid<\Delta c
$$
之后陀螺仪和角加速度计采集数据,经过ADC模数转换器处理后传到sensor registers,结合DMP可对相应数据解算,得到MPU6050的姿态信息。
I2C通信协议
通讯特点
-
两根通信线:SCL(serial clock)和SDA(serial data),通过英文定义我们大概可以知道SCL对应时钟,SDA则与数据传输相关。
-
同步:同步时序需要一根时钟线指导数据读写,因此它可以支持读写过程中的暂停,对硬件电路的依赖程度比较低;与之对应的异步时序则不需要时钟线,节省了部分资源,但是它对数据传输的速率和时间都有十分严格的要求,依赖硬件电路的支持。
-
半双工:发送和接收数据共用一根线(SDA),可双向传输;而全双工需要发送和接收两条线,单工则只能单向传输。
-
总线可接入多设备:一主多从、多主多从。
-
应用:广泛应用于MPU6050、OLED、AT24CO2等电子模块。
I2C时序
基本单元
-
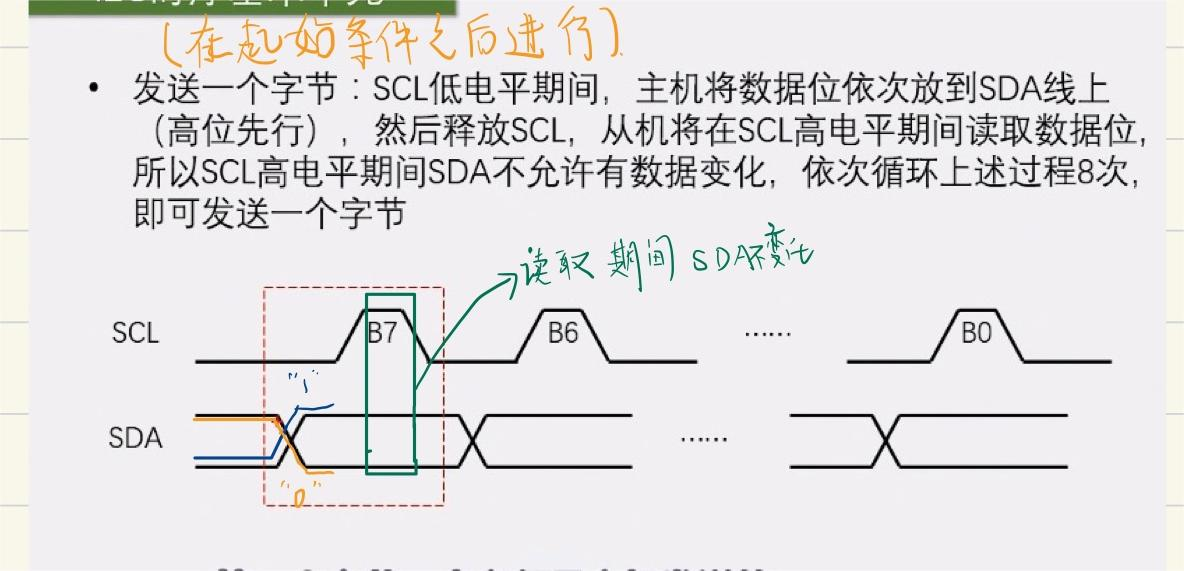
发送一个字节:发送字节时,SCL、SDA全程由主机控制。低电平时主机放数据,高电平时从机读数据。
-
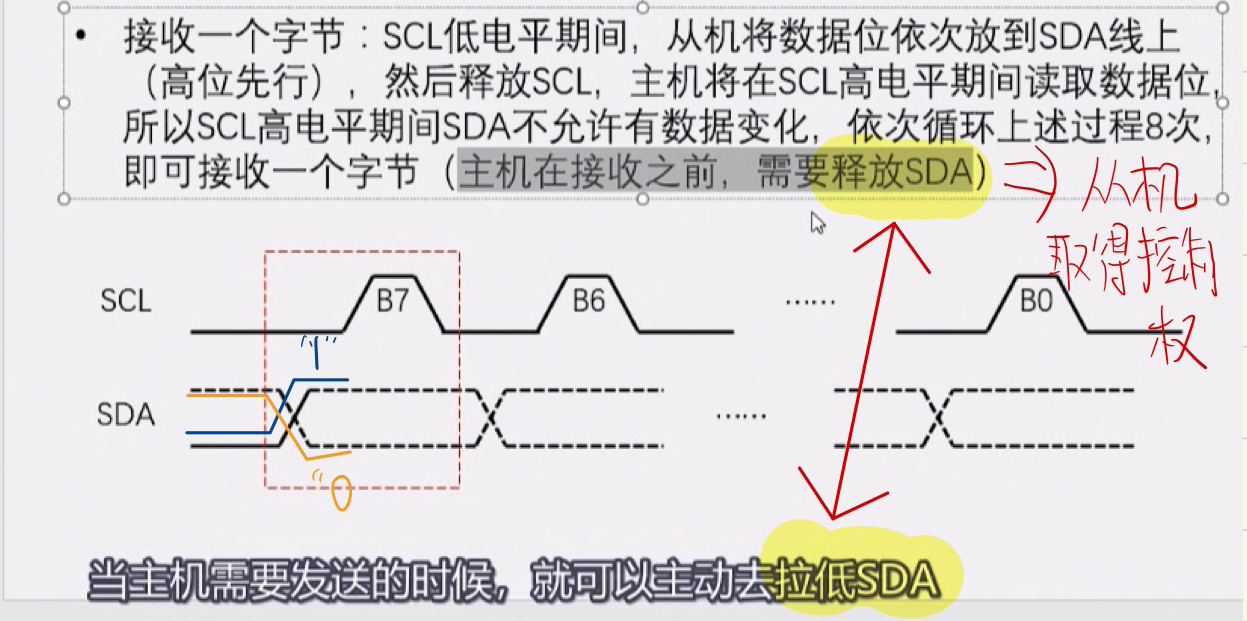
接收一个字节:低电平时从机放数据,高电平时主机读数据。
-
发送应答与接收应答:主机接收后发送;主机发送后接收。
时序实例
软件I2C实现MPU6050数据读写
前面我们提到MPU6050使用的是I2C通信协议,那么就需要找到SCL和SDA引脚,查找STM32F103C8T6引脚定义图可以知道这两个GPIO口分别为PB10、PB11。
MPU5060寄存器配置
采样频率分频器SMPRT_DIV
主要与数据刷新的快慢相关,


本次实验以陀螺仪晶振为例,不使用8KHz外部晶振,使用1kHz的晶振,故需启用DLPF。
配置寄存器CONFIG
主要考虑低通滤波器设置部分,即下图的0-2位。

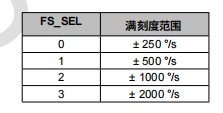
陀螺仪配置寄存器GYRO_CONFIG
第5-7位控制陀螺仪的自检(self test);第3、4位控制满量程的选择,满量程可以根据实际使用进行调节,使得实验数据更加精确。
类似于高中电路实验电表的选择?

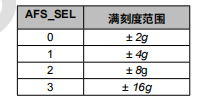
加速度计配置寄存器ACCEL_CONFIG
大致与陀螺仪配置寄存器相同,但是0-1位还可以用来配置高通滤波。

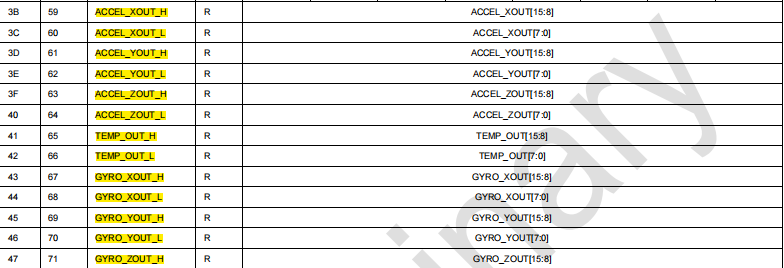
数据寄存器(加速度、陀螺仪、温度计等)
这几个寄存器类型为只读,可以读取加速度、角加速度、温度等原始信息。
库函数代码配置
SCL、SDA的读写函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
|
//SCL写入
void MyI2C_W_SCL(uint8_t Bitvalue)
{
GPIO_WriteBit(GPIOB,GPIO_Pin_10,(BitAction)Bitvalue);
Delay_us(10);
}
//SDA写入
void MyI2C_W_SDA(uint8_t Bitvalue)
{
GPIO_WriteBit(GPIOB,GPIO_Pin_11,(BitAction)Bitvalue);
Delay_us(10);
}
//SDA读取
uint8_t MyI2C_R_SDA(void)
{
uint8_t Bitvalue;
Bitvalue=GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11);
Delay_us(10);
return Bitvalue;
}
|
起始和终止函数
在SCL、SDA读写函数完成后,可以配置I2C通信协议的起止函数驱动:
1
2
3
4
5
6
7
8
9
10
11
12
13
|
void MyI2C_Start(void)
{
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
MyI2C_W_SDA(0);//先拉低SDA,后SCL.
MyI2C_W_SCL(0);
}
void MyI2C_Stop(void)
{
MyI2C_W_SDA(0);
MyI2C_W_SCL(1);
MyI2C_W_SDA(1);
}
|
在开始时先把SCL和SDA都拉高(置1)。考虑到结束时SDA数据并不总是低电平,为重复起始条件,需手动把SDA线先拉低到低电平,再操作SCL线;同样地,终止时SDA不总是低电平,需先将SDA拉低,再将其拉高完成终止操作。
简单来说就是,在SCL时钟线高电平的期间,SDA数据线不能有任何电平的翻转,若SCL时钟线高电平的期间SDA从低电平拉到高电平则重复开始,从高电平拉到低电平则会认为此时发送数据已结束。
I2C发送与接收数据
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
|
//发送8字节
void MyI2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i ++)
{
MyI2C_W_SDA(Byte & (0x80 >> i));
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
}
//接收部分
uint8_t MyI2C_ReceiveByte(void)
{
uint8_t i, Byte = 0x00;
MyI2C_W_SDA(1);//释放SDA
for (i = 0; i < 8; i ++)
{
MyI2C_W_SCL(1);
if (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);}
MyI2C_W_SCL(0);
}
return Byte;
}
|
发送数据时高位先行,发送结束后SCL置低电平;接收数据时同样是高位先行,接收结束后SCL置0。
发送与接收应答
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
void MyI2C_SendAck(uint8_t AckBit)
{
MyI2C_W_SDA(AckBit);
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
uint8_t MyI2C_ReceiveAck(void)
{
uint8_t AckBit;
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
AckBit = MyI2C_R_SDA();
MyI2C_W_SCL(0);
return AckBit;
}
|
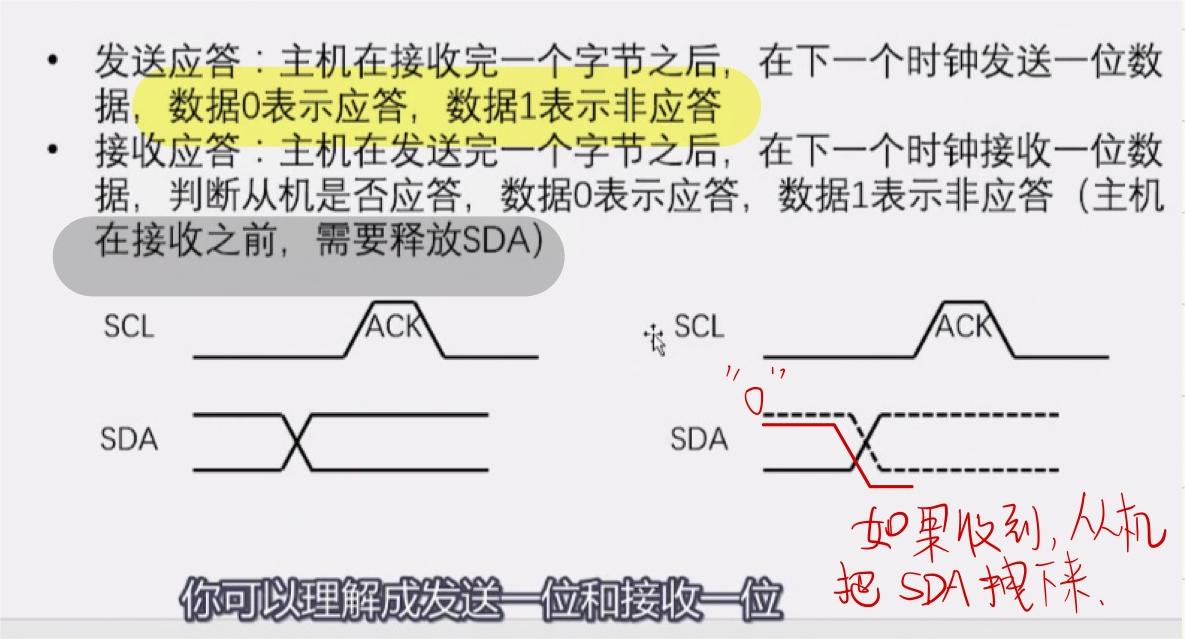
主机在接收完一个字节之后,在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答;发送完一个字节之后,在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)。
读写MPU6050的寄存器
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
|
//写寄存器
void MPU6050_WriteReg(uint8_t RegAddress,uint8_t Data)
{
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_SendByte(Data);
MyI2C_ReceiveAck();
MyI2C_Stop();
}
//读寄存器
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS | 0x01);
MyI2C_ReceiveAck();
Data=MyI2C_ReceiveByte();
MyI2C_SendAck(1);
MyI2C_Stop();
return Data;
}
|
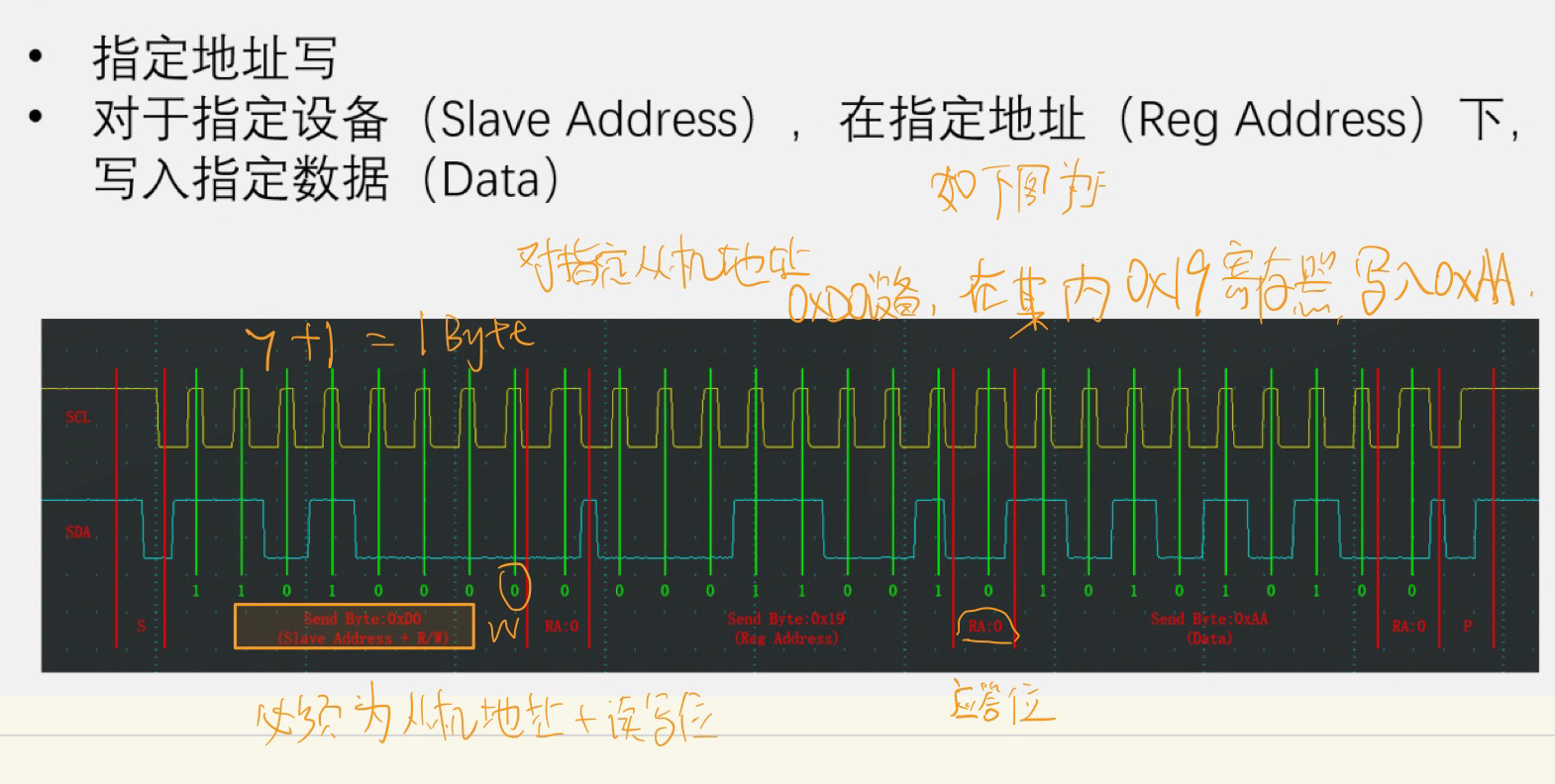
写寄存器的具体过程是:
-
开始
-
主机发送MPU6050地址
-
收到应答位
-
发送寄存器地址
-
收到应答位
-
发送数据
-
收到应答位
-
结束
每发送一次数据,都要接收相应的应答位,之后继续发送或是停止。
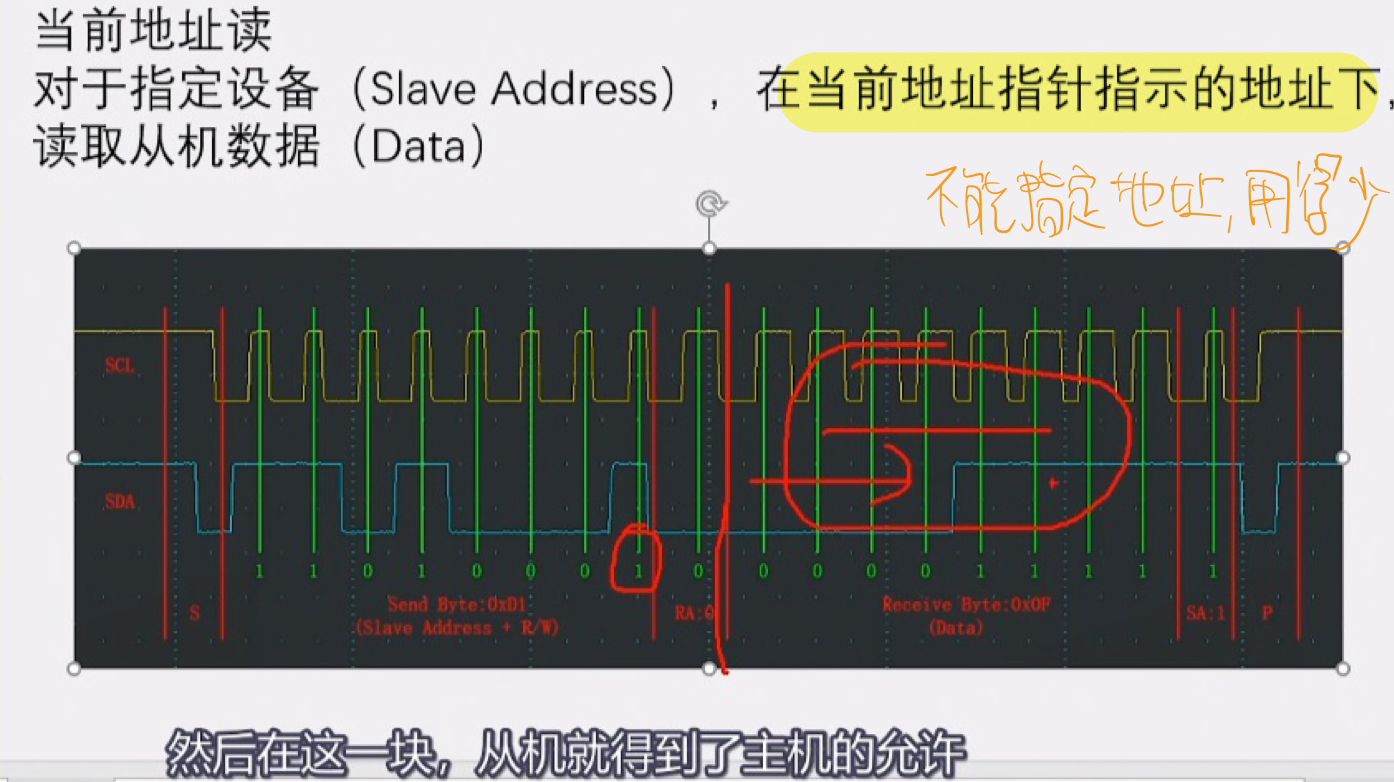
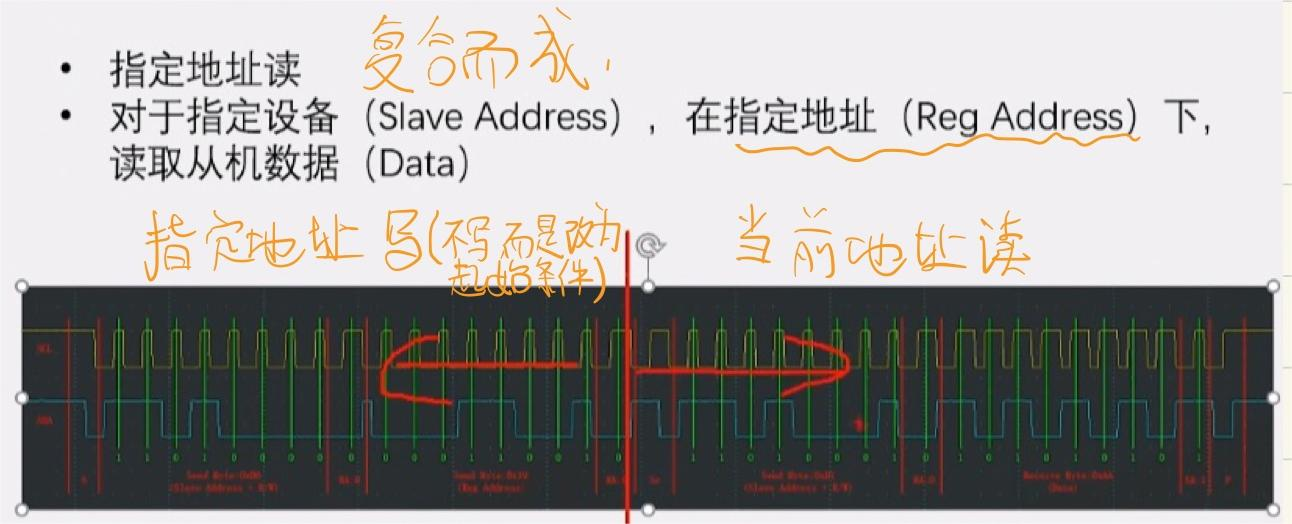
读寄存器过程大致相同,区别只是在于刚开始时要写一下MPU6050设备地址,相当于喊一下MPU6050,告知它我们要和它进行通讯了。
MPU6050初始化
在完成了MPU6050读写寄存器函数的配置后,我们就可以开始对MPU6050进行初始化。
需要写的寄存器有电源管理寄存器1、2,采样频率分频器,配置寄存器,陀螺仪配置寄存器,加速度配置寄存器。
1
2
3
4
5
6
7
8
9
10
|
void MPU6050_Init(void)
{
MyI2C_Init();
MPU6050_WriteReg(MPU6050_PWR_MGMT_1,0x01);
MPU6050_WriteReg(MPU6050_PWR_MGMT_2,0x00);
MPU6050_WriteReg(MPU6050_SMPLRT_DIV,0x09);
MPU6050_WriteReg(MPU6050_CONFIG,0x06);
MPU6050_WriteReg(MPU6050_GYRO_CONFIG,0x18);
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG,0x18);
}
|
读取MPU6050数据
通过读取前面所提到的数据寄存器,获取有符号的16位整型加速度、角加速度信息。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
|
//也可指定一个基地址,读取连续一片地址
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;
}
|
需要注意的是,获取器件ID号的部分函数是uint8_t的定义类型,需要单独封装。
1
2
3
4
|
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}
|
主函数编写
为了检验数据是否能正常采集,在OLED初始化过后,在主函数中调用MPU6050及相关函数,将数据显示到OLED显示屏上面。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
|
#include "stm32f10x.h"
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
uint8_t ID;
int16_t AX, AY, AZ, GX, GY, GZ;
//分层编写与测验代码
int main(void)
{
OLED_Init();
MPU6050_Init();
OLED_ShowString(1, 1, "ID:");
ID = MPU6050_GetID();
OLED_ShowHexNum(1, 4, ID, 2);
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
OLED_ShowSignedNum(2, 1, AX, 5);
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}
|
具体效果如下图所示:

读取数据经蓝牙发送
库函数实现USART串口初始化
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
|
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);//开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//GPIOA时钟使能
GPIO_PinRemapConfig(GPIO_Remap_USART1,ENABLE);//添加部分,GPIO口复用
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx;//仅配置接收TX
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
|
由于蓝牙串口发送暂时不需要RX引脚(即PA10),上面部分代码仅配置了PA9引脚,字长为8字节,停止位1,无校验位。
编写串口发送函数
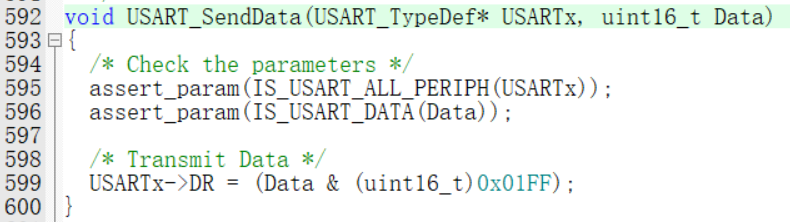
通过查找相应库函数,可以完成发送一个字节的功能。
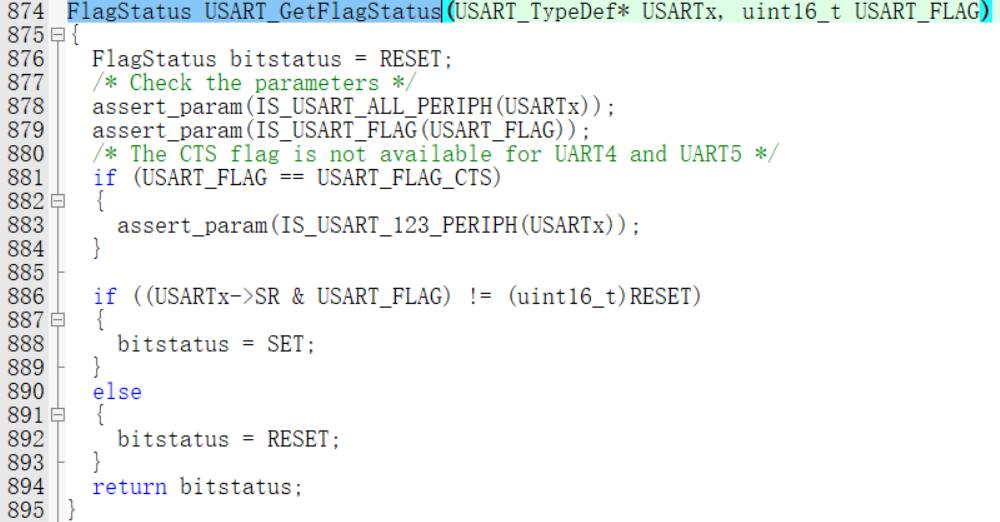
串口发送的函数其实就是向DR寄存器写入数据,Data&(uint16_t)0x01FF实现DR寄存器无关的高位清零;实际发送时,TDR寄存器把数据一位一位地转到移位寄存器中,如果发送过快,可能会产生数据覆写等错误,为了避免产生,我们需要调用函数FlagStatus USART_GetFlagStatus获取标志位,直到TXE标志位置SET时停止循环。
1
2
3
4
5
6
|
//发送一个字节
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);//再次写入时,标志位自动清零,所以不需要手动
}
|
这样就可以通过*Serial_SendByte()发送“+”和“-”以及封装发送数据的其他函数,后面r会用到。
printf函数的重定向
通过printf函数的重定向,我们可以实现printf打印输出串口数据,当然使用封装Serial_SendByte的Serial_SendString也可以达到目的。
注意加上头文件include <stdio.h>。
1
2
3
4
5
6
|
//对printf函数进行重定向,以使用printf
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
|
封装MPU6050数据发送函数
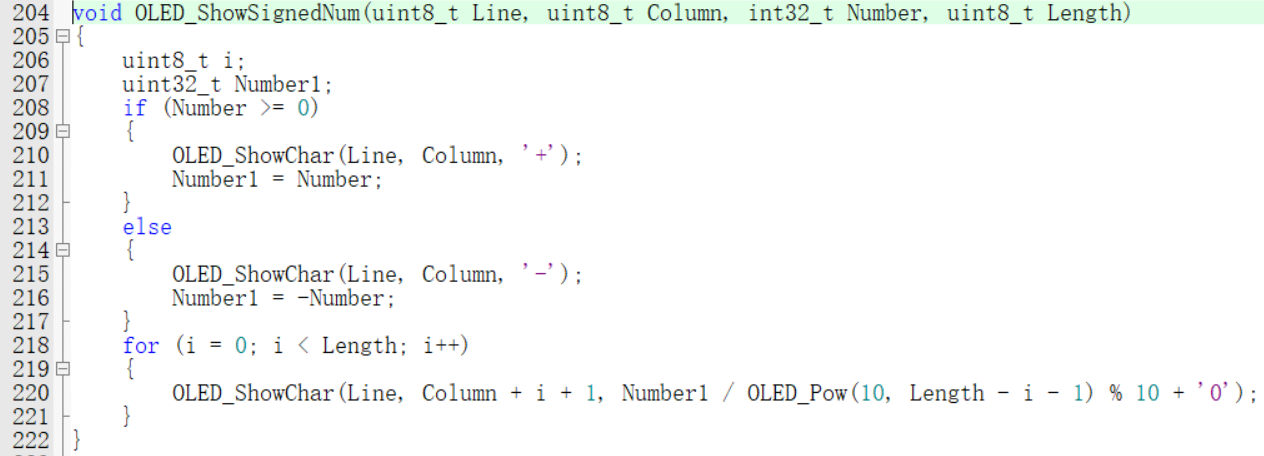
之前我们已经实现了OLED显示屏上打印读取的ACC和GYRO数据,其中如何将一串有符号数字打印出来呢?
可以参考一下以下库函数代码的思路:
对于一个多位数12345,12345/10000%10=1,12345/1000%10=2,12345/100%10=3,12345/10%10=4,也就是说我们可以通过整除和取余相结合,一个一个地取出类似的多位数的每一位。
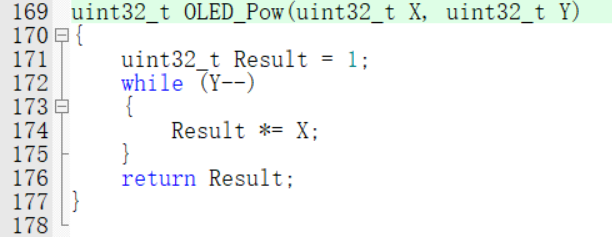
下列OLED_Pow函数可以实现X的Y次方的计算,之后循环取出每一位就可以打印出数据。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
|
//次方函数
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;//X^Y
}
return Result;
}
//发送ACC、GYRO数据
void serial_print_MPU6050data(int32_t Number, uint8_t Length)
{
uint8_t i;
uint32_t Number1;
if (Number >= 0)
{
Serial_SendByte( '+');
Number1 = Number;
}
else
{
Serial_SendByte( '-');
Number1 = -Number;
}
for (i = 0; i < Length; i++)
{
Serial_SendByte(Number1 / Serial_Pow(10, Length - i - 1) % 10 + '0');
//“/10”实现取左边,“%10”实现取右边;为了以字符形式一串行地显示,加上偏移'0'
}
printf("\r\n");//回车换行
}
|
主函数编写
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
|
int main(void)
{
MPU6050_Init();
Serial_Init();
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
printf("ACC:\r\n");
serial_print_MPU6050data(AX,6);
serial_print_MPU6050data(AY,6);
serial_print_MPU6050data(AZ,6);
printf("GYRO:\r\n");
serial_print_MPU6050data(GX,6);
serial_print_MPU6050data(GY,6);
serial_print_MPU6050data(GZ,6);
Delay_ms(1000);//延时1秒
}
}
|
最后在手机端蓝牙调试助手实现收发。